Digital AssetAvailable
Robot Visualization System for Windows (RVS4W)
Faculty of Engineering
Mechanical Engineering
McGill University
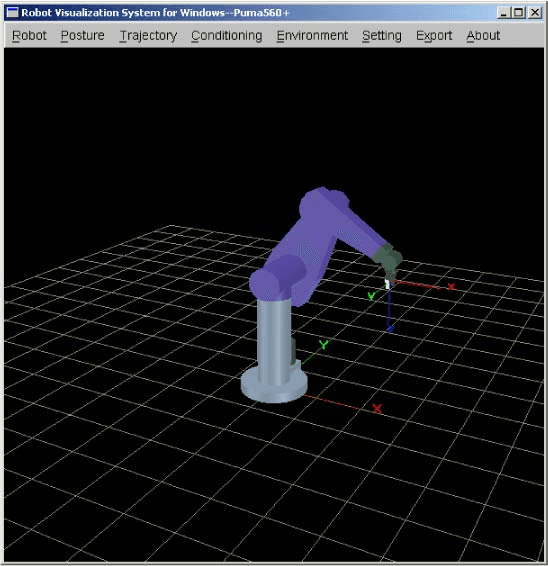
RVS is a piece of software written in C/C++, that works on Windows machines. The package is intended as a 3D visual tool for robot design and path-planning
RVS4W is a cross-platform version of its predecessor, the Robot Visualization System(RVS) written originally by John Darcovich on Silicon Graphics' IRIX. The RVS4W user interface was written from scratch, while keeping the user interface consistent and user-friendly. The RVS kinematics engine was debugged and enhanced.
The package is a 3D visualization tool to be used as a design or a path-planning tool. RVS4W incorporates many new features, not in RVS, including routines to evaluate the characteristic length, the maximum reach, the optimum posture---for minimum condition number---and the robot conditioning (the reciprocal of the minimum Jacobian condition number).
RVS4W supports:
- Forward kinematics
- Inverse kinematics
- Joint limits
- Posture pre-storing
- Trajectory-tracking in joint space
- Trajectory-tracking in Cartesian space
- Maximum-reach, characteristic length and optimum-posture evaluation
- Robot-Jacobian evaluation at a given posture
- Condition-number evaluation at a given posture
- A snapshot of the scene to be saved in Encapsulated PostScript (EPS), Portable Document Format (PDF) or Scalable Vector Graphics (SVG) formats
- Display of reference frame, the moving frames and the EE frame
- Creation and visualization of work environments
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
Digital AssetAvailable
Robot Visualization System for Windows (RVS4W)
Faculty of Engineering
Mechanical Engineering
McGill University
RVS is a piece of software written in C/C++, that works on Windows machines. The package is intended as a 3D visual tool for robot design and path-planning
RVS4W is a cross-platform version of its predecessor, the Robot Visualization System(RVS) written originally by John Darcovich on Silicon Graphics' IRIX. The RVS4W user interface was written from scratch, while keeping the user interface consistent and user-friendly. The RVS kinematics engine was debugged and enhanced.
The package is a 3D visualization tool to be used as a design or a path-planning tool. RVS4W incorporates many new features, not in RVS, including routines to evaluate the characteristic length, the maximum reach, the optimum posture---for minimum condition number---and the robot conditioning (the reciprocal of the minimum Jacobian condition number).
RVS4W supports:
- Forward kinematics
- Inverse kinematics
- Joint limits
- Posture pre-storing
- Trajectory-tracking in joint space
- Trajectory-tracking in Cartesian space
- Maximum-reach, characteristic length and optimum-posture evaluation
- Robot-Jacobian evaluation at a given posture
- Condition-number evaluation at a given posture
- A snapshot of the scene to be saved in Encapsulated PostScript (EPS), Portable Document Format (PDF) or Scalable Vector Graphics (SVG) formats
- Display of reference frame, the moving frames and the EE frame
- Creation and visualization of work environments
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
You might also like
Discover more resources that could support your research