ItemAvailable
Haptic Agile Wrist
Faculty of Engineering
Mechanical Engineering
McGill University
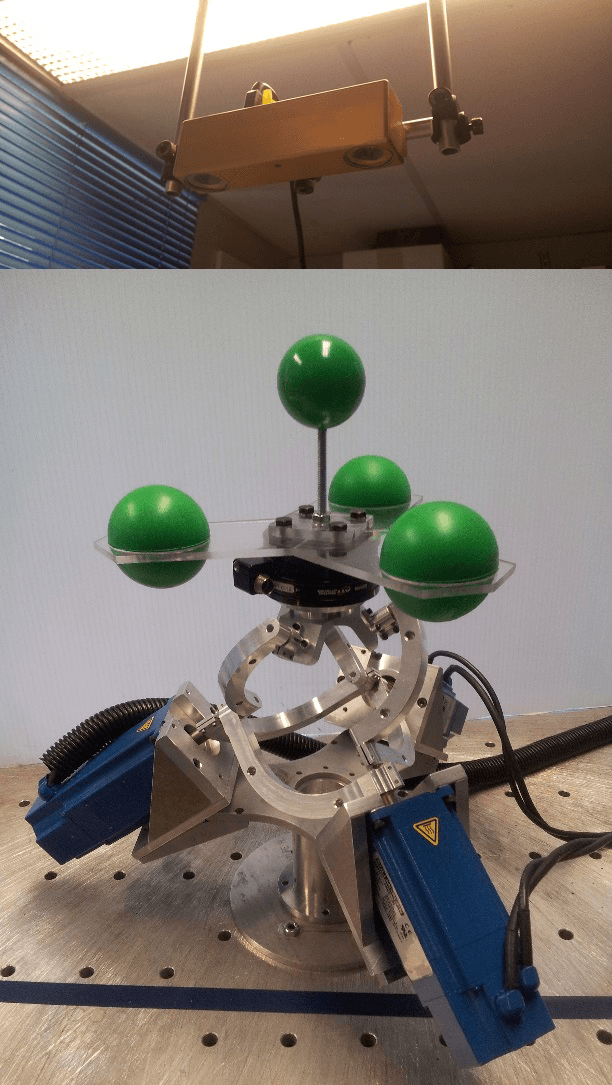
The Agile Wrist (AW) is a spherical parallel-kinematics machine intended to operate as a haptic joystick. The AW is capable of pure rotations about one point, the centre of the machine. Its kinematic chain comprises one base plate (BP) and one moving plate (MP), coupled by three limbs, each being composed of two links, one proximal (to the BP), one distal. The two links are coupled, in turn, by means of a passive revolute (R) joint, i.e., a pin joint. The proximal link is coupled, additionally, to the BP by means of a R joint actuated by a motor, the distal link being coupled to the BP by means of a passive R joint.
As the operator of the joystick impinges an arbitrary rotation to the MP by means of a handle, the motors respond with a torque that is proportional to the angle of rotation about each of the motor axes, the AW thereby functioning as a three-axis rotational linear spring. Nonlinear springs can also be emulated with the control software.
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
ItemAvailable
Haptic Agile Wrist
Faculty of Engineering
Mechanical Engineering
McGill University
The Agile Wrist (AW) is a spherical parallel-kinematics machine intended to operate as a haptic joystick. The AW is capable of pure rotations about one point, the centre of the machine. Its kinematic chain comprises one base plate (BP) and one moving plate (MP), coupled by three limbs, each being composed of two links, one proximal (to the BP), one distal. The two links are coupled, in turn, by means of a passive revolute (R) joint, i.e., a pin joint. The proximal link is coupled, additionally, to the BP by means of a R joint actuated by a motor, the distal link being coupled to the BP by means of a passive R joint.
As the operator of the joystick impinges an arbitrary rotation to the MP by means of a handle, the motors respond with a torque that is proportional to the angle of rotation about each of the motor axes, the AW thereby functioning as a three-axis rotational linear spring. Nonlinear springs can also be emulated with the control software.
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
You might also like
Discover more resources that could support your research