ItemAvailable
Redundant Parallel Kinematics Machine
Faculty of Engineering
Mechanical Engineering
McGill University
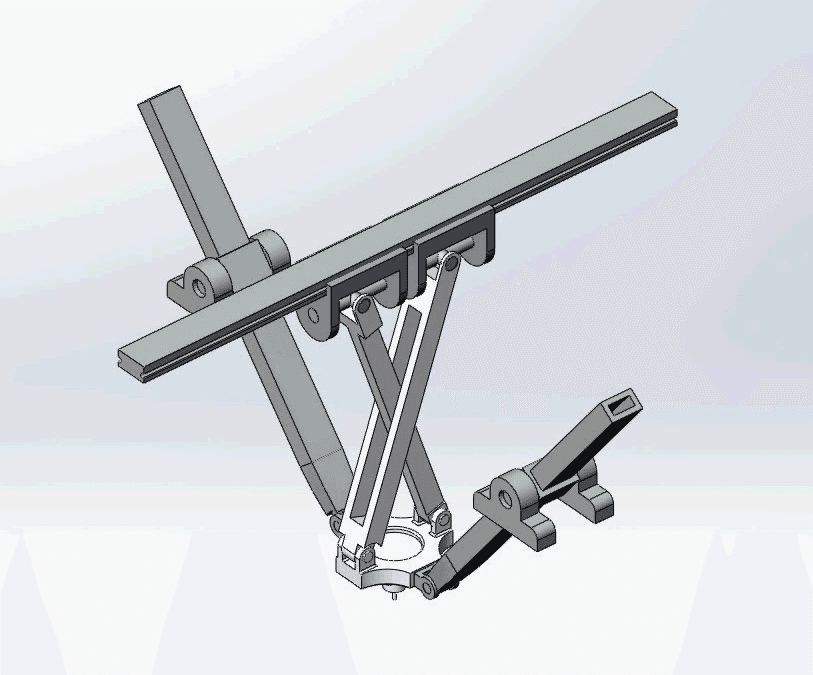
This redundantly-actuated parallel kinematics machine was developed for precision machining operations in collaboration with ZSTU Robotics Lab at Zhejiang Sci-Tech University. Designed to enhance stiffness and reduce vibration, the machine uses redundant actuators to improve accuracy and load-bearing capacity in multi-axis CNC machining applications. The robot can perform pitch, roll, translation, and combined motion to meet the demands of high-precision engineering.
For videos of the robot, click Pitch motion, Roll motion, Translation, Combined motion.
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
ItemAvailable
Redundant Parallel Kinematics Machine
Faculty of Engineering
Mechanical Engineering
McGill University
This redundantly-actuated parallel kinematics machine was developed for precision machining operations in collaboration with ZSTU Robotics Lab at Zhejiang Sci-Tech University. Designed to enhance stiffness and reduce vibration, the machine uses redundant actuators to improve accuracy and load-bearing capacity in multi-axis CNC machining applications. The robot can perform pitch, roll, translation, and combined motion to meet the demands of high-precision engineering.
For videos of the robot, click Pitch motion, Roll motion, Translation, Combined motion.
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
You might also like
Discover more resources that could support your research