EquipmentAvailable
Multi-Modular Manipulator
Faculty of Engineering
Mechanical Engineering
McGill University
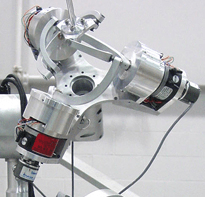
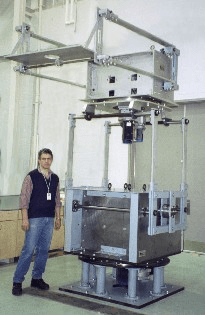
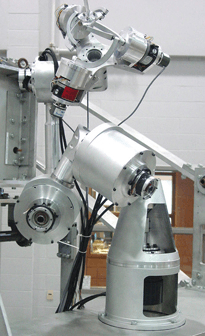
An 11-axis Multi-Modular Manipulator (M3) designed as a cascade of three modules: The Macro-Manipulator, the Cuatro Arm, and the Agile Wrist.
Possible applications:
To service and maintain aircraft and space structures
- In error-tolerant tasks:
- - cleaning
- - brushing
- In accuracy-demanding tasks:
- - stripping
- - deicing
- - painting
Purposes of the prototype:
To demonstrate accurate positioning of the tool carried by the orientation submodule in the presence of vibrations of the base due to the flexibility of the gross manipulator.
Main Components of the System:
Proximal Module (Gross Manipulator),
Distal Module (Fine Manipulator):
-Positioning Submodule (Cuatro Arm).
-Orientation Submodule (Agile Wrist).
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
EquipmentAvailable
Multi-Modular Manipulator
Faculty of Engineering
Mechanical Engineering
McGill University
An 11-axis Multi-Modular Manipulator (M3) designed as a cascade of three modules: The Macro-Manipulator, the Cuatro Arm, and the Agile Wrist.
Possible applications:
To service and maintain aircraft and space structures
- In error-tolerant tasks:
- - cleaning
- - brushing
- In accuracy-demanding tasks:
- - stripping
- - deicing
- - painting
Purposes of the prototype:
To demonstrate accurate positioning of the tool carried by the orientation submodule in the presence of vibrations of the base due to the flexibility of the gross manipulator.
Main Components of the System:
Proximal Module (Gross Manipulator),
Distal Module (Fine Manipulator):
-Positioning Submodule (Cuatro Arm).
-Orientation Submodule (Agile Wrist).
Robotic Mechanical Systems Laboratory (Dismantled)
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JA
Jorge Angeles
You might also like
Discover more resources that could support your research