Digital AssetAvailable
navlie
Faculty of Engineering
Mechanical Engineering
McGill University
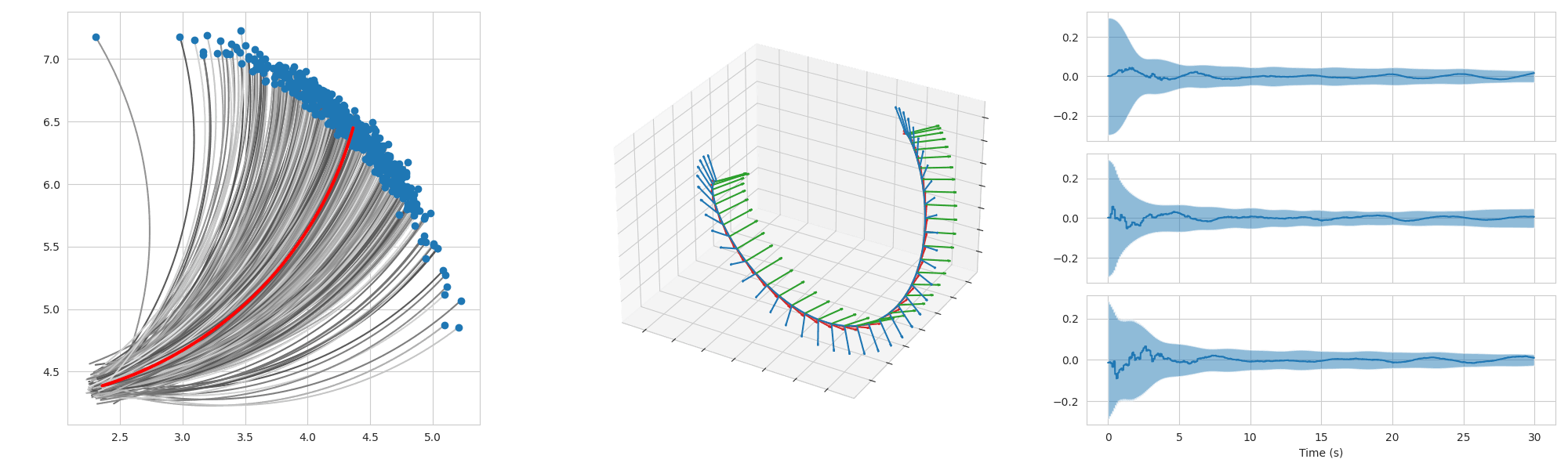
An on-manifold state estimation library for robotics.
The core idea behind this project is to abstract-away the state definition such that a single estimator implementation can operate on a variety of state manifolds, such as the usual vector space, and any Lie group. At the moment, algorithms and features of this package include:
- Extended Kalman Filter
- Iterated Extended Kalman Filter
- Sigmapoint Kalman Filters (Unscented, Spherical Cubature, Gauss-Hermite)
- Interacting Multiple Model Filter
- Batch MAP Estimation
- A large collection of common process and measurement models
- Out-of-the-box on-manifold numerical jacobian using finite differencing
- Various utils for plotting, error, and consistency evaluation
- Monte Carlo experiment executor with result aggregation
- A preintegration module for linear, wheel odometry, and IMU process models
DECAR
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JF
James Richard Forbes
Digital AssetAvailable
navlie
Faculty of Engineering
Mechanical Engineering
McGill University
An on-manifold state estimation library for robotics.
The core idea behind this project is to abstract-away the state definition such that a single estimator implementation can operate on a variety of state manifolds, such as the usual vector space, and any Lie group. At the moment, algorithms and features of this package include:
- Extended Kalman Filter
- Iterated Extended Kalman Filter
- Sigmapoint Kalman Filters (Unscented, Spherical Cubature, Gauss-Hermite)
- Interacting Multiple Model Filter
- Batch MAP Estimation
- A large collection of common process and measurement models
- Out-of-the-box on-manifold numerical jacobian using finite differencing
- Various utils for plotting, error, and consistency evaluation
- Monte Carlo experiment executor with result aggregation
- A preintegration module for linear, wheel odometry, and IMU process models
DECAR
Faculty of Engineering
Research lab focused on advancing scientific knowledge and innovation.
JF
James Richard Forbes
You might also like
Discover more resources that could support your research