EquipmentAvailable
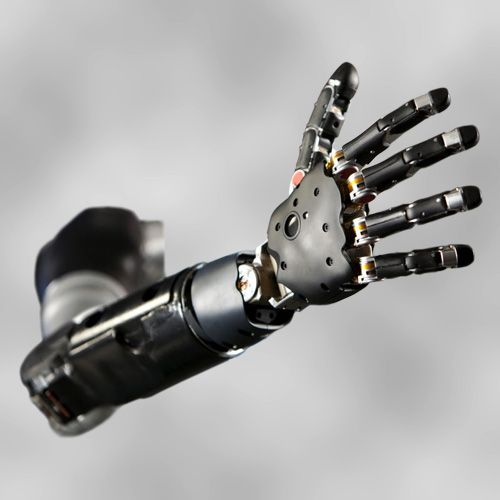
Modular Prosthetic Limb v3 HDT Global
University of Alberta
A sensorized anthropometric robotic arm used for researching improvements to neural interfaces and robotic prostheses.
Features:
17 active degrees of freedom including shoulder abduction/flexion, humeral rotation, elbow flexion, forearm rotation, radial/ulnar deviation, wrist flexion, and fully articulated fingers/thumbs
Fingertip and thumb-tip sensors (force and vibration)
Torque and impedance sensors for each joint
Mass: Hand (1.4kg) and Upper Arm (3.4kg)
Payload Capacity (wrist active): 5kg
Cylindrical Grasp Force: 310N
iSMART Institute
Research lab focused on advancing scientific knowledge and innovation.
II
iSMART Institute
Faculty of Science
University of Alberta
EquipmentAvailable
Modular Prosthetic Limb v3 HDT Global
University of Alberta
A sensorized anthropometric robotic arm used for researching improvements to neural interfaces and robotic prostheses.
Features:
17 active degrees of freedom including shoulder abduction/flexion, humeral rotation, elbow flexion, forearm rotation, radial/ulnar deviation, wrist flexion, and fully articulated fingers/thumbs
Fingertip and thumb-tip sensors (force and vibration)
Torque and impedance sensors for each joint
Mass: Hand (1.4kg) and Upper Arm (3.4kg)
Payload Capacity (wrist active): 5kg
Cylindrical Grasp Force: 310N
iSMART Institute
Research lab focused on advancing scientific knowledge and innovation.
II
iSMART Institute
Faculty of Science
University of Alberta
You might also like
Discover more resources that could support your research